无约束优化方法
本章介绍无约束函数的最优化算法。其中:
最速下降法基于「一阶梯度」。最基本的方法
牛顿法基于「二阶梯度」。最主要的方法
共轭梯度法基于「一阶梯度」。解大型最优化问题的首选
拟牛顿法基于「函数值和一阶梯度」。尤其是其中的 BFGS 是目前最成功的方法
Python 实战:极小化 Rosenbrock 函数
# 目标函数
def f ( x : np . ndarray ) -> float :
return ( 1 - x [ 0 ]) ** 2 + 100 * ( x [ 1 ] - x [ 0 ] ** 2 ) ** 2
# 一阶梯度
def g ( x : np . ndarray ) -> np . ndarray :
grad_x = - 2 * ( 1 - x [ 0 ]) - 400 * x [ 0 ] * ( x [ 1 ] - x [ 0 ] ** 2 )
grad_y = 200 * ( x [ 1 ] - x [ 0 ] ** 2 )
return np . array ([ grad_x , grad_y ])
# 二阶梯度
def G ( x : np . ndarray ) -> np . ndarray :
grad_xx = 2 - 400 * x [ 1 ] + 1200 * x [ 0 ] ** 2
grad_xy = - 400 * x [ 0 ]
grad_yx = - 400 * x [ 0 ]
grad_yy = 200
return np . array ([
[ grad_xx , grad_xy ],
[ grad_yx , grad_yy ]
])
# 初始点
initial_point = [ - 1.2 , 1 ]
已知最优点为 \(x^*=(1, 1)^T\) ,最优解 \(f(x^*)=0\) ,以书中例题初始点 \((-1.2,1)^T\) 为例开始迭代。
最速下降法 牛顿法 共轭梯度法 拟牛顿法
def gradient_descent ( initial_point , max_iter = 5 , eps = 1e-6 ):
x = np . array ( initial_point )
points = [ x ]
gradients = [ g ( x )]
alphas = []
for _ in range ( max_iter ):
grad = gradients [ - 1 ]
# 搜索方向
direction = - grad
# 步长因子:无法确定准确的步长最小化函数,因此此处采用二分法搜索最优步长
alpha = 1
while f ( x + alpha * direction ) > f ( x ):
alpha /= 2
x = x + alpha * direction
points . append ( x )
gradients . append ( g ( x ))
alphas . append ( alpha )
if np . linalg . norm ( grad ) < eps :
break
return points , gradients , alphas
points , gradients , alphas = gradient_descent ( initial_point , max_iter = 100 , eps = 1e-6 )
for i , ( point , grad , alpha ) in enumerate ( zip ( points , gradients , [ 1 ] + alphas )):
print ( f "Iteration { i } :" )
print ( f " Point = { point } " )
print ( f " Gradient = { grad } " )
print ( f " Step Size = { alpha } " )
print ( f " Direction = { - grad } " )
print ( f " Function Val= { f ( point ) } \n " )
迭代 100 次后输出为:
def newton_method ( initial_point , max_iter = 5 , eps = 1e-6 ):
x = np . array ( initial_point )
points = [ x ]
gradients = [ g ( x )]
Hessians = [ G ( x )]
for _ in range ( max_iter ):
grad = gradients [ - 1 ]
Hessian = Hessians [ - 1 ]
# 搜索方向
direction = np . linalg . inv ( Hessian ) @ grad
# 步长因子:假定使用固定步长的牛顿法
alpha = 1
x = x - alpha * direction
points . append ( x )
gradients . append ( g ( x ))
Hessians . append ( G ( x ))
if np . linalg . norm ( grad ) < eps :
break
return points , gradients , Hessians
points , gradients , Hessians = newton_method ( initial_point , max_iter = 50 , eps = 1e-6 )
for i , ( point , grad , Hessian ) in enumerate ( zip ( points , gradients , Hessians )):
print ( f "Iteration { i } :" )
print ( f " Point = { point } " )
print ( f " Gradient = { grad } " )
print ( f " Hessian = { Hessian } " )
print ( f " Function Val= { f ( point ) } \n " )
迭代 7 次即收敛:
Iteration 5 :
Point = [ 0 .9999957 0 .99999139]
Gradient = [ -8.60863343e-06 -2.95985458e-11]
Hessian = [[ 801 .99311306 -399.99827826]
[-399.99827826 200. ]]
Function Val = 1 .8527397192178054e-11
Iteration 6 :
Point = [ 1 . 1 .]
Gradient = [ 7 .41096051e-09 -3.70548037e-09]
Hessian = [[ 802 .00000001 -400. ]
[-400. 200. ]]
Function Val = 3 .4326461875363225e-20
Iteration 7 :
Point = [ 1 . 1 .]
Gradient = [ -0. 0 .]
Hessian = [[ 802 . -400.]
[-400. 200.]]
Function Val = 0 .0
def conjugate_gradient ( initial_point , max_iter = 5 , eps = 1e-6 ):
x = np . array ( initial_point )
points = [ x ]
gradients = [ g ( x )]
directions = [ - g ( x )]
alphas = []
for i in range ( max_iter ):
grad = gradients [ - 1 ]
# 搜索方向:FR公式
if i == 0 :
direction = - grad
else :
beta = np . dot ( g ( x ), g ( x )) / np . dot ( g ( points [ - 2 ]), g ( points [ - 2 ]))
direction = - g ( x ) + beta * direction
# 步长因子:精确线搜索直接得到闭式解
alpha = - np . dot ( grad , direction ) / np . dot ( direction , G ( x ) @ direction )
x = x + alpha * direction
directions . append ( direction )
alphas . append ( alpha )
points . append ( x )
gradients . append ( g ( x ))
if np . linalg . norm ( grad ) < eps :
break
return points , gradients , alphas
points , gradients , alphas = conjugate_gradient ( initial_point , max_iter = 1000 , eps = 1e-6 )
for i , ( point , grad , alpha ) in enumerate ( zip ( points , gradients , alphas )):
print ( f "Iteration { i } :" )
print ( f " Point = { point } " )
print ( f " Gradient = { grad } " )
print ( f " Step Size = { alpha } " )
print ( f " Direction = { - grad } " )
print ( f " Function Val= { f ( point ) } \n " )
迭代 1000 次后输出为:
Iteration 997 :
Point = [ 0 .9999994 0 .99999875]
Gradient = [ 1 .90794906e-05 -1.01414007e-05]
Step Size = 0 .0005161468619784313
Direction = [ -1.90794906e-05 1 .01414007e-05]
Function Val = 6 .191018745155016e-13
Iteration 998 :
Point = [ 0 .99999931 0 .99999861]
Gradient = [ 5 .43686111e-06 -3.40374227e-06]
Step Size = 0 .0005078748917694624
Direction = [ -5.43686111e-06 3 .40374227e-06]
Function Val = 4 .986125950068217e-13
Iteration 999 :
Point = [ 0 .9999993 0 .9999986]
Gradient = [ 1 .34784246e-06 -1.36924747e-06]
Step Size = 0 .0005356250138048412
Direction = [ -1.34784246e-06 1 .36924747e-06]
Function Val = 4 .881643528976312e-13
def bfgs ( initial_point , max_iter = 5 , eps = 1e-6 ):
x = np . array ( initial_point )
points = [ x ]
gradients = [ g ( x )]
B = G ( x )
for _ in range ( max_iter ):
grad = gradients [ - 1 ]
# 迭代公式
x = x - np . linalg . inv ( B ) @ grad
# 更新 B 矩阵
s = x - points [ - 1 ]
y = g ( x ) - gradients [ - 1 ]
B = B + np . outer ( y , y ) / ( s @ y ) - ( B @ np . outer ( s , s ) @ B ) / ( s @ B @ s )
points . append ( x )
gradients . append ( g ( x ))
if np . linalg . norm ( grad ) < eps :
break
return points , gradients
points , gradients = bfgs ( initial_point , max_iter = 1000 , eps = 1e-6 )
for i , ( point , grad ) in enumerate ( zip ( points , gradients )):
print ( f "Iteration { i } :" )
print ( f " Point = { point } " )
print ( f " Gradient = { grad } " )
print ( f " Function Val= { f ( point ) } \n " )
迭代 78 次收敛:
Iteration 76 :
Point = [ 1 .00000075 0 .99999921]
Gradient = [ 0 .000918 -0.00045825]
Function Val = 5 .255482679080297e-10
Iteration 77 :
Point = [ 1 .00000006 1 .00000012]
Gradient = [ 6 .46055099e-07 -2.63592925e-07]
Function Val = 3 .7061757712619374e-15
Iteration 78 :
Point = [ 1 . 1 .]
Gradient = [ 6 .75185684e-10 4 .68913797e-10]
Function Val = 6 .510026595267928e-19
4.1 最速下降法
放一张生动的图:
迭代公式:
\[
x_{k+1} = x_k - \alpha_k \nabla f(x_k)
\]
每次迭代时,下降方向 \(d_k\) 采用当前解 \(x_k\) 处的负梯度方向 \(- \nabla f(x_k)\) ,步长因子 \(\alpha_k\) 采用精确线性搜索算法的计算结果。
易证相邻迭代解 \(x_k,x_{k+1}\) 的方向 \(d_k,d_{k+1}\) 是正交的:由于 \(\phi(\alpha) = f(x_k + \alpha d_k)\) ,在采用线搜索找最优步长时,步长的搜索结果 \(\alpha_k\) 即为使得 \(\phi'(\alpha)=0\) 的解,于是可得 \(0=\phi'(\alpha) = \phi'(\alpha_k) = \nabla f(x_k+\alpha_k d_k)d_k = -d_{k+1}^T \cdot d_k\) ,即 \(d_{k+1}^T \cdot d_k = 0\) 。如图:
也正因为搜索方向正交的特性导致最速下降法的收敛速度往往不尽如人意。优点在于程序设计简单并且计算和存储量都不大,以及对初始点的要求不高。
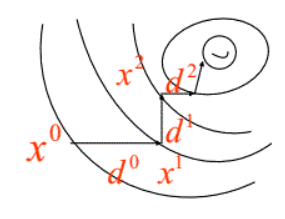
4.2 牛顿法
放一张生动的图:
Warning
注:本图演示的是求解一维函数零点的迭代过程,需要使得 \(f(x)=0\) ,因此比值式为原函数除以导函数。后续介绍的是极小化函数的过程,需要使得 \(f'(x)=0\) ,因此比值式为一阶导数除以二阶导数,高维就是二阶梯度的逆乘以一阶梯度。
迭代公式:
\[
x_{k+1} = x_k - \nabla^2f(x_k)^{-1}\nabla f(x_k)
\]
牛顿法相较于最速下降法有了更快的收敛速度,但是由于需要计算和存储海塞矩阵导致计算量增加并且有些目标函数可能根本求不出二阶梯度。同时牛顿法对于初始迭代点的选择比最速下降法要苛刻的多。
4.3 共轭梯度法
我们利用共轭梯度法解决「正定二次函数」的极小化问题。由于最速下降法中相邻迭代点的方向是正交的导致搜索效率下降,牛顿法又由于需要计算和存储海塞矩阵导致存储开销过大,共轭梯度法的核心思想是 相邻两个迭代点的搜索方向是关于正定二次型的正定阵正交的 。这样既保证了迭代收敛的速度也避免了计算存储海塞矩阵的开销。美中不足的是当共轭梯度法解决其他问题是往往会出现对线搜索的过度依赖,一旦线搜索变差会导致整个迭代过程精度变差。
概念补充:
共轭:\(x\) 与 \(y\) 共轭当且仅当 \(x^TGy=0\) ,其中 G 为对称正定阵
正定二次:\(f(x) =\frac{1}{2} x^TGx - b^Tx + c\)
公式推导:
首先给定初始迭代点 \(x_0\) ,收敛阈值 \(\epsilon\) ,迭代公式是不变的:\(x_{k+1} = x_k + \alpha_k d_k\) ,关键在于计算每一次迭代过程中的步长因子 \(\alpha_k\) 和搜索方向 \(d_k\)
确定步长因子 \(\alpha_k\) :
\[
\begin{aligned}
\alpha &= \min_{\alpha} \phi(\alpha) \\
&= \min_{\alpha} f(x_k+\alpha d_k) \\
&= \min_{\alpha} \frac{1}{2}(x_k+\alpha d_k)^TG(x_k+\alpha d_k) - b^T(x_k+\alpha d_k) + c \\
&= \min_{\alpha} \frac{1}{2} (x_k^TGx_k + 2\alpha x_k^T G d_k + \alpha^2d_K^Td_k) - b^Tx_k - b^T \alpha d_k + c\\
&= \min_{\alpha} \frac{1}{2} x_k^TGx_k + \alpha x_k^T G d_k + \frac{1}{2}\alpha^2d_k^T G d_k - b^T \alpha d_k + c
\end{aligned}
\]
由于目标函数是正定二次型,显然可以直接求出步长因子的闭式解:
\[
\begin{aligned}
\frac{d \phi(\alpha)}{d\alpha} &= x_k^T G d_k + \alpha d_k^T G d_k - b^Td_k \\
&= 0
\end{aligned}
\]
于是可以导出当前的步长因子 \(\alpha_k\) 的闭式解为:
\[
\begin{aligned}
\alpha_k &= \frac{(b^T - x^TG)d_k}{d_k^TGd_k} \\
&= -\frac{g_k^T d_k}{d_k^TGd_k}
\end{aligned}
\]
确定搜索方向 \(d_k\) :
\[
d_k = -g_k + \beta d_{k-1}
\]
可见只需要确定组合系数 \(\beta\) 。由于共轭梯度法遵循相邻迭代点的搜索方向共轭,即 \(d_{k-1}^TGd_k=0\) ,因此对上式两侧同时左乘 \(d_{k-1}^TG\) ,有:
\[
\begin{aligned}
d_{k-1}^TGd_k &= -d_{k-1}^TGg_k + \beta d_{k-1}^TGd_{k-1} \\
&= 0
\end{aligned}
\]
于是可得当前的组合系数 \(\beta\) 为:
\[
\beta = \frac{d_{k-1}^TGg_k}{d_{k-1}^TGd_{k-1}}
\]
上述组合系数 \(\beta\) 的结果是共轭梯度最原始的表达式,后人又进行了变形,~~没证出来,难崩,直接背吧~~,给出 FR 的组合系数表达式:
\[
\begin{aligned}
\beta = \frac{g_k^Tg_k}{g_{k-1}^T g_{k-1}}
\end{aligned}
\]
当然了由于初始迭代时没有前一个搜索方向,因此直接用初始点的梯度作为搜索方向,即:
\[
d_0 =-g_0
\]
于是可以导出当前的搜索方向 \(d_k\) 的闭式解为:
\[
d_k = -g_k + \frac{g_k^Tg_k}{g_{k-1}^T g_{k-1}} d_{k-1}
\]
迭代公式:
\[
\begin{aligned}
x_{k+1} =& x_k + \alpha_k d_k\\
=& x_k + (-\frac{g_k^T d_k}{d_k^TGd_k}) (-g_k + \frac{g_k^Tg_k}{g_{k-1}^T g_{k-1}} d_{k-1})
\end{aligned}
\]
4.4 拟牛顿法
4.1 和 4.2 介绍的基于一阶梯度和二阶梯度的下降法都可以统一成下面的表达式:
\[
x_{k+1} = x_k - \alpha_k B_k \nabla f(x_k)
\]
4.1 的最速下降法的步长因子通过精确线搜索获得,海塞矩阵的逆 \(B_k\) 不存在,可以看做为单位阵 \(E\)
4.2 的牛顿法的步长因子同样可以通过精确线搜索获得,当然也可以设置为定值,海塞矩阵的逆 \(B_k\) 对应二阶梯度的逆 \((\nabla^2 f(x_k))^{-1}\)
前者收敛速度差、后者计算量和存储量大,我们尝试构造一个对称正定阵 \(B_k\) 来近似代替二阶梯度的逆,即 \(B_k \approx (\nabla^2 f(x_k))^{-1}\) ,使得该法具备较快的收敛速度与较少的内存开销。
介绍最著名的 BFGS 拟牛顿法,它的核心思想是每次迭代过程中对其进行快速校正,从而在确保收敛速度的情况下提升计算效率。迭代公式如下:
\[
\begin{aligned}
&x_{k+1} = x_k - B_k^{-1}g_k \\
&\text{记: }
\begin{cases}
s_k = x_{k+1} - x_k\\
y_k = g_{k+1} - g_k
\end{cases}\\
&\text{则: }
\begin{cases}
B_0 = \nabla^2f(x_0)\\
\displaystyle B_{k+1} = B_k + \frac{y_ky_k^T}{s_k^Ty_k} - \frac{B_ks_ks_k^TB_k}{s_k^TB_ks_k}
\end{cases}
\end{aligned}
\]
参考:
最小二乘法
本章继续介绍无约束函数的最优化算法。不过和第四章的区别在于现在的目标函数是二次函数,称为「最小二乘问题」。
所谓的无约束最小二乘问题,本质上是第四章介绍的无约束问题的一个子集,只不过因为使用场景很多所以单独拿出来进行讨论。也正因为使用场景多,学者们针对此类问题设计出了更加高效的最优化算法。
无约束最小二乘问题的形式定义为:
\[
\begin{aligned}
\min_{x\in R^n}f(x)=\frac{1}{2}\sum_{i = 1}^m [r_{i}(x)]^2,\quad m\ge n
\end{aligned}
\]
其中 \(r_i(x)\) 称为「残量函数」。本质上最小二乘问题就是寻找一个函数 \(f(x,\alpha_i),(i=1,2,\cdots,m)\) 来拟合 \(b\) ,于是问题就转化为了
\[
\begin{aligned}
\min { \sum_{i = 1}^m [r_i(x)]^2 }=\min { \sum_{i = 1}^m [f(x,\alpha_i) - b_i]^2 }
\end{aligned}
\]
当 \(r_i(x)\) 为线性函数时,当前问题为线性最小二乘问题;当 \(r_i(x)\) 为非线性函数时,当前问题为非线性最小二乘问题。本章将分别讨论这两种最小二乘问题的优化求解策略。
5.1 线性最小二乘
此时可以直接将目标函数写成:
\[
\begin{aligned}
\min f(x)&=\frac{1}{2}|| Ax-b ||^2\\
&= \frac{1}{2}x^TA^TAx-b^TAx+\frac{1}{2}b^Tb
\end{aligned}
\]
利用一阶必要条件可得:
\[
\begin{aligned}
\nabla f(x)&= A^TAx - A^Tb\\
&= 0
\end{aligned}
\]
于是可得最优闭式解:
\[
x^*=(A^T A)^{-1}A^Tb
\]
当然 \(A^TA\) 并不都是可逆的,并且在数据量足够大时,即使可逆也会让求逆操作即为耗时。针对此问题,提出了线性最小二乘的 QR 正交分解算法。
5.2 非线性最小二乘
同样可以采用第四章学到的各种下降迭代算法,这里引入高斯牛顿法,推导的解的迭代公式为:
\[
x^{k+1}= x^k - (A_k^TA_k)^{-1}A_k^Tr_k
\]
其中:
\[
\begin{aligned}
A_k =
\begin{bmatrix}
\nabla r_1(x_k)\\
\nabla r_2(x_k)\\
\vdots \\
\nabla r_m(x_k)
\end{bmatrix},\quad
r_k =
\begin{bmatrix}
r_1(x_k)\\
r_2(x_k)\\
\vdots \\
r_m(x_k)
\end{bmatrix}\\
\end{aligned}
\]
参考:
2025年3月23日
2025年3月8日
GitHub