线性搜索
本章介绍最优化问题中迭代解 \(x_{k+1} = x_k + \alpha_kd_k\) 基于「线性搜索」的迭代方式。
假设搜索方向 \(d_{k}\) 是一个定值且一定是下降方向,我们讨论步长因子 \(\alpha_{k}\) 的计算选择策略。分为两步:
- 确定步长的搜索区间
- 通过精确 or 不精确算法来搜索合适的步长
本章的内容分布:
- 3.1 介绍 确定初始搜索区间 的「进退法」
- 3.2 介绍 缩小搜索区间 的「精确线性搜索算法」:0.618 法、斐波那契法、二分法、插值法
- 3.3 介绍 缩小搜索区间 的「不精确线性搜索算法」:Armijo 准则、Goldstein 准则、Wolfe 准则
确定初始搜索区间
确定初始搜索区间 \([a,b]\),我们利用 进退法
精确线性搜索算法
预备知识:单峰函数定理
在正式开始介绍之前,我们先了解 单峰函数定理:
-
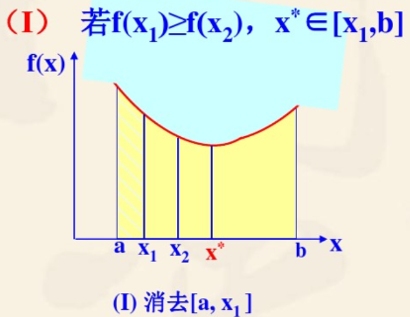
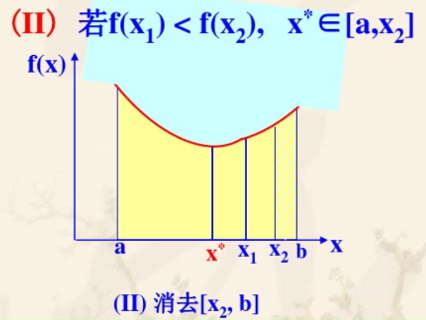
定理:对于在区间 \([a,b]\) 上的一个单峰函数 \(f(x)\),\(x^* \in [a,b]\) 是其极小点,\(x_1\) 和 \(x_2\) 是 \([a,b]\) 上的任意两点,且 \(a<x_1<x_2<b\),可以通过比较 \(f(x_1),f(x_2)\) 的值来确定点的保留和舍弃
-
迭代:
-
若 \(f(x_1) \ge f(x_2)\) 则 \(x^* \in [x_1,b]\)
-
若 \(f(x_1) < f(x_2)\) 则 \(x^* \in [a,x_2]\)
-
若 \(f(x_1) = f(x_2)\) 则 \(x^* \in [x_1,x_2]\)
于是迭代的关键就在于如何取点 \(x_1\) 和 \(x_2\),下面开始介绍三种取点方法。
基于 python 实现:0.618 法、斐波那契法、二分法
| class ExactLinearSearch:
def __init__(self,
a: float, b: float, delta: float,
f: Callable[[float], float],
criterion: str="0.618", max_iter=100) -> None:
self.a = a
self.b = b
self.delta = delta
self.f = f
self.max_iter = max_iter
if criterion == "0.618":
new_a, new_b, x_star, count = self._f_goad()
elif criterion == "fibonacci":
new_a, new_b, x_star, count = self._f_fibo()
else: # criterion == "binary"
new_a, new_b, x_star, count = self._f_binary()
fixed = lambda x, acc: round(x, acc)
print(f"算法为:“{criterion}” 法")
print(f"共迭代:{count} 次")
print(f"左边界: {fixed(new_a, 4)}")
print(f"右边界: {fixed(new_b, 4)}")
print(f"最优解: {fixed(x_star, 4)}")
print(f"最优值: {fixed(f(x_star), 6)}\n")
def _f_goad(self) -> Tuple[float, float, float, int]:
a, b, delta, f = self.a, self.b, self.delta, self.f
count = 0
lam = a + 0.382 * (b - a)
mu = b - 0.382 * (b - a)
while count <= self.max_iter:
phi_lam = f(lam)
phi_mu = f(mu)
if phi_lam <= phi_mu:
b = mu
else:
a = lam
lam = a + 0.382 * (b - a)
mu = b - 0.382 * (b - a)
if b - lam <= delta:
return a, b, lam, count
if mu - a <= delta:
return a, b, mu, count
count += 1
return a, b, lam if f(lam) <= f(mu) else mu, count
def _f_fibo(self) -> Tuple[float, float, float, int]:
a, b, delta, f, max_iter = self.a, self.b, self.delta, self.f, self.max_iter
count = None
F = [0.0] * max_iter
F[1] = F[2] = 1
for i in range(3, max_iter):
F[i] = F[i - 1] + F[i - 2]
if F[i] >= (b - a) / delta:
count = i - 2
break
if count == None:
ValueError("区间过大或精度过高导致,找不到合适的迭代次数")
lam, mu = a, b
for i in range(3, count + 1):
lam = a + (1 - F[i - 1] / F[i]) * (b - a)
mu = b - (1 - F[i - 1] / F[i]) * (b - a)
if f(lam) <= f(mu):
b = mu
else:
a = lam
return a, b, lam if f(lam) <= f(mu) else mu, count
def _f_binary(self) -> Tuple[float, float, float, int]:
a, b, delta, f, max_iter = self.a, self.b, self.delta, self.f, self.max_iter
count = None
count = np.ceil(np.log2((b - a) / delta)).astype(int)
if count > max_iter:
ValueError("区间过大或精度过高导致迭代次数过高")
for _ in range(count):
c = (a + b) / 2.0
if f(c) >= 0.0:
b = c
else:
a = c
return a, b, c, count
|
| a, b, delta = -1, 1, 0.01
f = lambda x: np.exp(-x) + np.exp(x) # 原函数
calc_goad = ExactLinearSearch(a, b, delta, f, criterion="0.618")
calc_fibo = ExactLinearSearch(a, b, delta, f, criterion="fibonacci")
a, b, delta = -3, 6, 0.1
f = lambda x: 2 * x + 2 # 导函数
calc_bina = ExactLinearSearch(a, b, delta, f, criterion="binary")
|
| 算法为:“0.618” 法
共迭代:10 次
左边界: -0.0031
右边界: 0.0069
最优解: 0.0007
最优值: 2.000001
算法为:“fibonacci” 法
共迭代:11 次
左边界: -0.0225
右边界: 0.0
最优解: -0.0139
最优值: 2.000193
算法为:“binary” 法
共迭代:7 次
左边界: -1.0312
右边界: -0.9609
最优解: -0.9609
最优值: 0.078125
|
0.618 法
基于「函数值」进行选点。
按照黄金分割的比例取点 \(x_1\) 和 \(x_2\),不断迭代判断 \(f(x_1)\) 和 \(f(x_2)\) 的值,直到 \(b_k-\lambda_k<\delta\) 或 \(\mu_k-a_k<\delta\) 则结束迭代,取最优解 \(x^*\) 为对应的 \(\lambda_k\) 或 \(\mu_k\) 即可。
Fibonacci 法
基于「函数值」进行选点。
第 \(k\) 次迭代的区间长度是上一个区间长度的 \(\frac{F_{n-k}}{F_{n-k+1}}\),即:
\[
b_{k+1} - a_{k+1} = \frac{F_{n-k}}{F_{n-k+1}} (b_{k} - a_{k})
\]
经过 \(n\) 次迭代后,得到区间 \([a_n,b_n]\),且 \(b_n-a_n \le \delta\),于是可得:
\[
\begin{aligned}
b_n-a_n &= \frac{F_1}{F_2}(b_{n-1}-a_{n-1}) \\
&= \frac{F_1}{F_2} \frac{F_2}{F_3}(b_{n-2}-a_{n-2}) \\
&= \cdots \\
&= \frac{F_1}{F_2} \frac{F_2}{F_3} \cdots \frac{F_{n-1}}{F_n}(b_{1}-a_{1}) \\
&= \frac{F_1}{F_n}(b_1-a_1) \le \delta
\end{aligned}
\]
在已知上界 \(\delta\) 的情况下可以直接计算出 \(n\) 的值,于是迭代 \(n\) 次即可得到最终的步长值 \(\lambda_n\) 或 \(\mu_n\)
3.2.3 二分法
基于「一阶导数」进行选点。
单调性存在于导数上。极值点左边导数 \(<0\),极值点右边导数 \(>0\),于是可以进行二分搜索。
3.2.4 插值法
基于「函数值、一阶导数」进行选点。
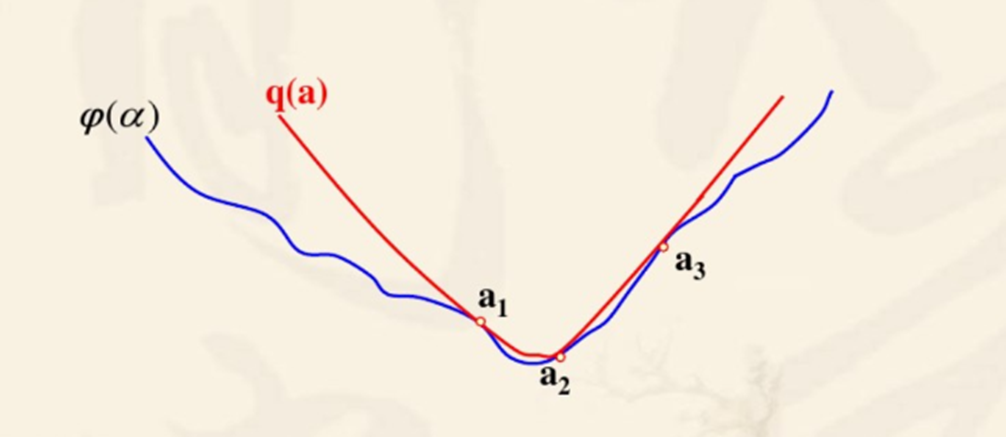
三点二次插值法。给定初始迭代区间 \([a_0,b_0]\) 和初始迭代解 \(t_0\)。每次在目标函数上取三个点来拟合一个二次函数,通过拟合出来的二次函数的最小值,来更新三个点为 \(a_1,b_1,t_1\),直到区间小于上界长度 \(\delta\),终止迭代,极小值就是当前状态二次函数的最小值。
那么我们如何求解当前状态二次函数的最小值呢?假定三个已知点为 \(x_1<x_2<x_3\),且 \(f(x_1)>f(x_2)<f(x_3)\),我们需要知道二次函数的三个参数 \(a,b,c\),刚好三个已知点可以得到三个方程,从而解出二次函数的三个未知数。
两点二次插值法。只不过少取了一个点,多利用了一个点的导数值来确定二次函数的三个参数罢了,其余迭代过程与三点二次插值完全一致。
不精确线性搜索算法
精确搜索有时会导致搜索时间过长,尤其是当最优解离当前点还很远时。接下来我们介绍不精确线性搜索方法,在确保每一步的函数值都有充分下降的必要条件下,确保收敛并提升计算效率。真的有这么厉害的算法吗?其实根本逻辑很简单,Armijo 准则 限定了搜索方向的上界、Goldstein 准则 在前者的基础上又限定了搜索方向的下界(防止过小导致收敛过慢)、Wolfe 准则 在前者的基础上又完善了下界的约束(确保不会把可行解排除在搜索区间外)
符号定义:我们在已知上一步解 \(x_k\) 和下次迭代的下降方向 \(d_k\) 的基础上,需要寻找合适的 \(\alpha\)。于是唯一变量就是 \(\alpha\),我们直接定义关于 \(\alpha\) 的一元函数 \(\phi(\alpha) = f(x_k + \alpha d_k)\),\(g_k\) 表示梯度。
Armijo 准则
只限定搜索上界,给定初始点 \(x_0\)、系数 \(\rho\):
\[
f(x_k + \alpha d_k) \le \rho \cdot g_k^Td_k \cdot \alpha + f(x_k)
\]
Goldstein 准则
又限定了搜索下界,同样给定初始点 \(x_0\)、系数 \(\rho\):
\[
\begin{aligned}
f(x_k + \alpha d_k) \le &\rho \cdot g_k^Td_k \cdot \alpha + f(x_k)\\
f(x_k + \alpha d_k) \ge &(1-\rho) \cdot g_k^Td_k \cdot \alpha + f(x_k)
\end{aligned}
\]
Wolfe 准则
完善了搜索下界的约束,即保证新点的梯度 \(g_{k+1}^Td_k\) 不低于老点梯度 \(g_{k}^Td_k\) 的 \(\sigma\) 倍。给定 \(x_0,\rho,\sigma\):
\[
\begin{aligned}
f(x_k + \alpha d_k) \le &\rho \cdot g_k^Td_k \cdot \alpha + f(x_k)\\
g(x_k + \alpha_kd_k)^Td_k \ge& \sigma g_{k}^Td_k\\
0 < \rho < \sigma < 1
\end{aligned}
\]
参考: