矩阵
行列式是一种运算,运算结果是一个数,而矩阵是一种表示,表示一个数表,常用来表示一个线性方程组的系数。
基本概念¶
下面补充几个常见的名词:
- 方阵。若矩阵的行列数相等(假设为 \(n\)),则可以称该矩阵为:方阵、\(n\) 阶矩阵、\(n\) 阶方阵;
- 对角阵。即方阵的非主对角线元素均为 \(0\),主对角线元素不限。符号表示为 \(\mathbf{\Lambda}=diag(\lambda_1,\lambda_2,\cdots,\lambda_n)\);
- 单位阵。即方阵的非主对角线元素均为 \(0\),主对角线元素均为 \(1\)。符号表示为 \(\mathbf{E}=diag(1,1,\cdots,1)\);
- 纯量阵。即方阵的非主对角线元素均为 \(0\),主对角线元素均为 \(\lambda\)。符号表示为 \(\mathbf{S}=diag(\lambda,\lambda,\cdots,\lambda)\)。
矩阵运算¶
元素级运算¶
两个形状相同的矩阵按元素逐个进行加、减、乘、除等运算。
向量级运算¶
向量有内积(点积)和外积(叉积)两种运算。前者计算出一个标量,后者计算出一个矩阵。以 \(\mathbf{x},\mathbf{y},\mathbf{z}\) 三个 \(n\) 维向量和实数 \(\lambda\) 为例:
-
向量的内积,记 \([\cdot,\cdot]\) 为两个长度相等的向量作内积,有以下性质:
- \([\mathbf x, \mathbf y] = [\mathbf y,\mathbf x]\);
- \([\lambda \mathbf x,\mathbf y] = \lambda [\mathbf x,\mathbf y]\);
- \([\mathbf x + \mathbf y,\mathbf z] = [\mathbf x,\mathbf z] + [\mathbf y,\mathbf z]\);
- \([\mathbf x, \mathbf x] \geq 0\),且当 \(x \ne 0\) 时有 \([\mathbf x,\mathbf x] > 0\)。
-
向量的长度,有以下性质:
- 非负性:当 \(\mathbf x \ne \mathbf 0\) 时,\(\|\mathbf x\| > 0\);当 \(\mathbf x =\mathbf 0\) 时,\(\|\mathbf x\| = 0\);
- 齐次性:\(\|\lambda\mathbf x\| = \lambda\|\mathbf x\|\);
- 三角不等式:\(\|\mathbf x +\mathbf y\| \le \|\mathbf x\| + \|\mathbf y\|\)。
-
向量的夹角:
- 当 \(\|\mathbf x\| = 1\) 时,称 \(x\) 为单位向量;
- 当 \(\|\mathbf x\| \ne \mathbf 0\land \|\mathbf y\| \ne \mathbf 0\) 时,\(\theta = \arccos \frac{[\mathbf x,\mathbf y]}{\|\mathbf x\|\|\mathbf y\|}\)。
矩阵级运算¶
矩阵算律如下:
- 结合律:\((\mathbf A\mathbf B)\mathbf C=\mathbf A(\mathbf B \mathbf C)\);
- 分配率:\(\mathbf A(\mathbf B+\mathbf C)=\mathbf A\mathbf B+\mathbf A\mathbf C,(\mathbf B+\mathbf C)\mathbf A=\mathbf B\mathbf A+\mathbf C\mathbf A\);
- 常数因子可以随意交换顺序:\(\lambda(\mathbf A\mathbf B)=(\lambda\mathbf A)\mathbf B=\mathbf A(\lambda\mathbf B)\);
- 单位阵可以随意交换顺序或直接省略:\(\mathbf A\mathbf E=\mathbf E\mathbf A=\mathbf A\);
- 幂运算:若 \(\mathbf A\) 是 \(n\) 阶矩阵,则 \(\mathbf A\) 的 \(k\) 次幂为 \(\mathbf A^k=\underbrace{\mathbf A\mathbf A\cdots \mathbf A}_{k\text{个}}\),且 \(\mathbf A^m \mathbf A^k=\mathbf A^{m+k},(\mathbf A^m)^k=\mathbf A^{mk}\),其中 \(m,k\) 为正整数。
*注:矩阵乘法没有交换律。\(\mathbf{AB}\) 称为 \(\mathbf{A}\) 左乘 \(\mathbf{B}\)。交换成立的前提是 \(\mathbf{A}\) 和 \(\mathbf{B}\) 左乘和右乘合法相等才可以。
矩阵转置¶
矩阵转置算律有以下四点:
- \((\mathbf{A}^T)^T=\mathbf{A}\);
- \((\mathbf{A}+\mathbf{B})^T=\mathbf{A}^T+\mathbf{B}^T\);
- \((\lambda \mathbf{A})^T=\lambda \mathbf{A}^T\);
- \((\mathbf{AB})^T=\mathbf{B}^T\mathbf{A}^T\)。
证明 4:左边的 \(c_{ij}\) 其实应该是 \(AB\) 的 \(c_{ji}\) ,对应 \(A\) 的第 \(j\) 行与 \(B\) 的第 \(i\) 列,那么反过来对于 \(ij\) 就是 \(B\) 转置的第 \(i\) 行与 \(A\) 转置的第 \(j\) 列。
对称矩阵¶
对于一个方阵 \(\mathbf{A}\),若有 \(\mathbf{A} = \mathbf{A}^T\) 则称 \(\mathbf{A}\) 为对称矩阵,简称对称阵。给一个对阵矩阵的例题:
方阵的行列式¶
行列式算律有以下三点:
- \(\vert \mathbf{A}^T\vert=\vert \mathbf{A}\vert\);
- \(\vert \lambda \mathbf{A}\vert=\lambda^n\vert \mathbf{A}\vert\);
- \(\vert \mathbf{AB}\vert=\vert \mathbf{A}\vert\vert \mathbf{B}\vert\)。
对于上述第 3 点,显然有:\(\vert \mathbf{AB}\vert=\vert \mathbf{A}\vert\vert \mathbf{B}\vert=\vert \mathbf{B}\vert\vert \mathbf{A}\vert=\vert \mathbf{BA}\vert\),即 \(\vert \mathbf{AB}\vert=\vert \mathbf{BA}\vert\)。
伴随矩阵¶
用 \(\mathbf{A}^*\) 表示 \(\mathbf{A}\) 的伴随矩阵,则有:
其中 \(\mathbf{A}^*\) 表示为:
其中 \(\mathbf A_{ij}\) 即代数余子式。
逆矩阵¶
逆矩阵的定义¶
对于 \(n\) 阶矩阵 \(\mathbf A\),若有 \(\mathbf A\mathbf B = \mathbf B\mathbf A = \mathbf E\) ,则称 \(\mathbf B\) 为 \(\mathbf A\) 的逆矩阵,记作 \(\mathbf B=\mathbf A^{-1}\)。若 \(\vert\mathbf A\vert = 0\),则 \(\mathbf A\) 为又称奇异矩阵;若 \(\vert\mathbf A\vert \ne 0\),则 \(\mathbf A\) 为又称非奇异矩阵。
逆矩阵的性质¶
如下:
- 唯一性。如果矩阵 \(\mathbf A\) 可逆,则 \(\mathbf A\) 的逆矩阵是唯一的;
- 非奇异性。\(\mathbf A\) 可逆 \(\iff \vert\mathbf A \vert \ne 0\)。
逆矩阵的计算方法¶
知道了逆矩阵的定义和性质后,想要求解一个方阵的逆矩阵就有以下两种求法:
- 方法一:首先判断 \(\mathbf A\) 的行列式是否为 \(0\),若 \(\vert\mathbf A\vert \ne 0\) ,则说明矩阵 \(\mathbf A\) 可逆,那么就有 \(\mathbf A^{-1} = \frac{1}{\vert\mathbf A\vert}\mathbf A^*\);
- 方法二:如果可以找到 \(\mathbf A\mathbf B=\mathbf E\) 或 \(\mathbf B\mathbf A = \mathbf E\),那么就有 \(\mathbf A^{-1}= \mathbf B\)。
逆矩阵的运算规律¶
如下:
- \({(\mathbf A^{-1})}^{-1} = \mathbf A\);
- \(({\lambda \mathbf A})^{-1} = \frac{1}{\lambda} \mathbf A^{-1}\);
- \(({\mathbf A\mathbf B})^{-1} = \mathbf B^{-1}\mathbf A^{-1}\);
- \((\mathbf A^T)^{-1} = (\mathbf A^{-1})^{T}\);
- \(\vert \mathbf A^{-1}\vert = {\vert \mathbf A\vert}^{-1}\);
- \(\vert \mathbf A^*\vert = {\vert \mathbf A\vert}^{n - 1}\)。
克拉默法则¶
克拉默法则是求解一般线性方程组的一个特殊场景,适用于求解「未知数数量和方程个数相等,且系数行列式不为零」的线性方程组。
克拉默法则的定义¶
如果线性方程组:
的系数矩阵 \(\mathbf A\) 的行列式不为零:
则方程组有唯一解:
其中 \(\mathbf A_j\ (j=1,2,...,n)\) 是把系数矩阵 \(\mathbf A\) 中第 \(j\) 列的元素用常数向量 \(\mathbf b\) 代替后的 \(n\) 阶矩阵:
克拉默法则的证明¶
首先将方程组转化为矩阵方程:
然后应用逆矩阵消元:
最后应用 行列式的按行/列展开 中补充的性质即可得到最终的结果:
矩阵分块法¶
矩阵分块法本质就是将子矩阵看作一个整体进行运算,类似于 分治 算法。注意,在对矩阵进行分块计算的时候,有两个注意点,一是两个矩阵一开始的规格要相同,二是两个矩阵分块之后的子矩阵规格也要相同。我们重点关注对角分块矩阵。
对角分块矩阵的定义¶
主对角线为子矩阵:
其中 \(\mathbf A_1,\mathbf A_2,...,\mathbf A_s\) 都是方阵。
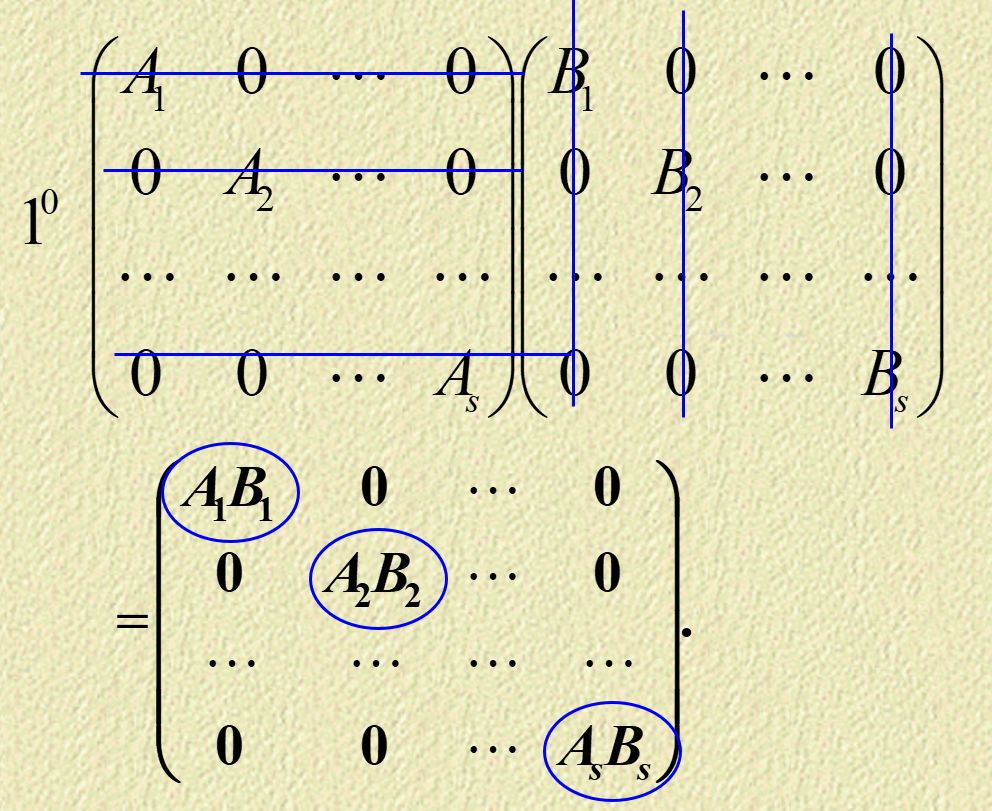
对角分块矩阵的运算¶
分别介绍幂运算、行列式运算、逆矩阵运算。
幂运算就是主对角线相应子矩阵的幂运算。如下图所示:
行列式运算使用了上三角的性质。如下式:
逆矩阵就是主对角线的子矩阵按位取逆。若 \(\vert \mathbf A_i\vert\ne 0\ (i=1,2,\cdots,s)\),则 \(\vert \mathbf A\vert\ne 0\),且有: